Méthodes de navigation
Nous pouvons classer les méthodes de navigation pour un robot mobile en classes : méthodes classiques et avancées. La nature de l’environnement détermine l’approche de la navigation, les méthodes classiques ont comme point commun, l’environnement qui est totalement ou partiellement connu c’est-à-dire un environnement statique et non complexe et par conséquent, le robot mobile peut planifier une trajectoire continue et libre d’obstacles. Par contre les méthodes avancées offrent des outils plus performants dans la navigation ce qui permet d’obtenir un robot « réactif », capable d’apporter une réponse immédiate à toute nouvelle modification de l’environnement du moment que ce dernier est complètement inconnu.
Qu’est ce qu’une roadmap ?
La roadmap, ou feuille de route en français, est un document simple et facilement compréhensible qui regroupe de façon visuelle et chronologique l’ensemble des objectifs, des tâches et des jalons stratégiques de votre projet. Il s’agit d’une sorte de fil conducteur des actions à accomplir et des dates clés pour réaliser votre projet.
Roadmaps
Au lieu de décomposer l’espace libre de la carte de l’environnement en cellules, il est possible de le décomposer en ensemble de chemins partiels, à l’aide d’un certain nombre de points de passages dispersés dans l’environnement. Le principe du roadmap est de combiner ces chemins partiels afin de créer un chemin global reliant le point de départ avec la destination finale. En général il y a deux méthodes pour construire les roadmaps sont : le graph de visibilité et le diagramme de voronoï.
Graphe de visibilité
Est un graph qui inclut des lignes droites qui relient les sommets des obstacles visibles entre eux. Cependant, cette proximité aux obstacles peut être indésirable, par exemple si le robot doit se déplacer rapidement.
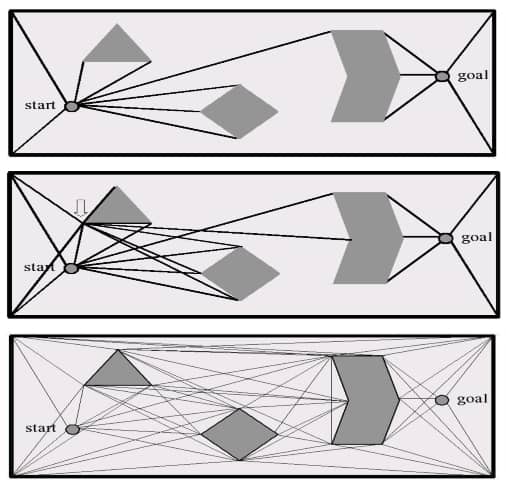
Diagramme de voronoï
Le diagramme de Voronoï est une autre méthode pour calculer un roadmap, qui maximise le dégagement avec des obstacles. Dans ce cas, les points de passage du roadmap sont des points équidistants au moins de trois obstacles.
D’autres méthodes peuvent encore être trouvées dans la référence.