Optimisation de forme aérodynamique
L’optimisation de forme est utilisée lors de la phase de conception préliminaire, pour aider l’ingénieur aérodynamicien à concevoir les formes de l’avion. L’optimisation automatique de forme aérodynamique permet de minimiser une fonction coût sous contraintes, en jouant sur des variables géométriques qui paramétrisent la forme. La fonction coût est issue des données aérodynamiques. C’est typiquement la traînée de l’avion, ou un écart à une répartition de pression objectif. Les contraintes peuvent être d’ordre aérodynamique (respecter une portance minimale) ou concernant la forme (envergure maximale de l’aile, épaisseur ou volume minimal). On appelle observation le calcul d’une quantité (comme la portance) sur le champ aérodynamique, qui entre en compte dans la formulation de la fonction coût ou d’une contrainte. Enfin, l’optimisation automatique de forme nécessite une méthode de déformation de la surface. Dassault Aviation, comme d’autres [6], a fait le choix de paramétrer la forme aérodynamique. La minimisation de la fonction coût se fait à l’aide d’une méthode utilisant un gradient. Cela demande le calcul des dérivées partielles des observations aérodynamiques par rapport aux variables géométriques. Il faut donc connaître les dérivées partielles du champ aérodynamique par rapport aux variables géométriques. Deux méthodes existent pour calculer ces dérivées. La méthode directe calcule pour chaque variation de variable géométrique la variation de toutes les observations. La méthode adjointe, issue de la théorie du contrôle optimal [99, 114, 126] utilise un système adjoint associé à une observation pour obtenir en un seul calcul toutes les variations de variables géométriques. La méthode directe est plus efficace lorsqu’il y plus d’observations que de variables, et la méthode adjointe est plus intéressante lorsqu’il y plus de variables que d’observations. Pour plus de détails, on pourra consulter [4, 37, 42]. Le gradient des équations de la mécanique des fluides peut s’obtenir de deux façons. Soit les équations sont linéarisées analytiquement et résolues à l’aide de schéma ad hoc, soit le schéma numérique de résolution des équations non-linéaires est linéarisé par différenciation automatique (la section 2.3.2 traite spécifiquement cette notion). La première méthode, qui est utilisée dans [86, 126, 147], est appelée gradient continu. La deuxième [6] est dénommée Optimisation de forme aérodynamique Figure 1.1 – Mode symétrique de voilure sur un Rafale avec emports. gradient discret. Ces deux techniques ont chacune leurs avantages et leurs inconvénients. Sans volonté d’exhaustivité, la méthode du gradient continu permet une analyse théorique du schéma, mais la définition des conditions aux limites est technique. A contrario, la méthode du gradient discret ne demande pas de travail théorique important pour les conditions aux limites, mais rend délicate l’analyse du schéma. Par exemple, le gradient de la stabilisation du schéma non-linéaire doit être inclus dans le linéarisé. L’analyse théorique de ce terme est compliquée (sur son impact pratique, on pourra consulter les résultats de la section 5.2.3). Enfin, on notera que l’utilisation du gradient discret permet toujours de diminuer la fonction coût sur le maillage choisi, tandis que la méthode du gradient continu ne garantit cette diminution que dans la limite d’une discrétisation infiniment fine.
Aeroélasticité
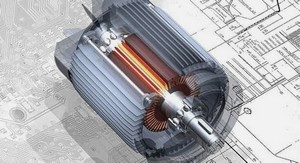
Le flottement (flutter en anglais) est un phénomène aéroélastique, c’està-dire de couplage entre le fluide et la structure de l’avion. Il correspond à un transfert d’énergie du fluide vers la structure. Si ce transfert d’énergie est supérieur à l’amortissement des modes structuraux, ceux-ci deviennent auto-entretenus et leur amplitude augmente, parfois jusqu’à destruction de l’aéronef. La vitesse de l’avion influe sur la quantité d’énergie que le fluide apporte aux modes structuraux. Afin d’éviter de devoir coupler les calculs de mécanique des fluides et de structure, les forces aérodynamiques générées par chaque mode sont calculées séparément, avant d’être recombinées par la méthode p-k [85], que l’on trouvera également décrite dans [51]. Les calculs sont effectués sur des modes de structure. La figure 1.1 montre le déplacement associé à un mode de voilure symétrique sur un Rafale avec emports. Les efforts aérodynamiques associés à chaque mode doivent être calculés sur un ensemble de dix fréquences et au moins six vitesses de l’avion. Plus de modes sont évalués ainsi, pour une campagne d’évaluation de flottement sur un avion. Cela fait un total de 24000 calculs à réaliser. Cela exclut l’utilisation d’une méthode temporelle, où l’on calculerait l’écoulement aérodynamique autour de l’avion en mouvement à la fréquence souhaitée, car elle serait trop coûteuse en temps de calcul. Une méthode linéarisée fréquentielle, telle que décrite par Lesoine dans [97], permet de diminuer substantiellement le temps de calcul. L’approche linéarisée fréquentielle est utilisée chez Dassault Aviation [38], mais également par le DLR [111, 158] à l’aide du code Tau [60]. Un calcul d’ordre de grandeur permet de trouver un temps acceptable pour une utilisation industrielle de l’approche linéarisée. Si chacun des 24000 calculs demande une minute pour sa résolution, le temps total de calcul de la campagne d’aéroélasticité est d’un peu plus de 16 jours, ce qui est raisonnable et compatible avec une utilisation industrielle.
Aéroacoustique
L’aéroacoustique traite de l’acoustique en présence d’écoulements (propagation et production de bruit), et sert à évaluer l’impact sonore des avions au décollage, à l’atterrissage ou encore au sol. Plusieurs types de sources acoustiques génèrent le bruit d’un avion. Les sources aérodynamiques, dues à la turbulence, émettent un bruit sur un large spectre, qui est dû aux nombreuses échelles spatiales de la turbulence. Les sources issues des machines tournantes, principalement les réacteurs, ont un spectre resserré sur des fréquences caractéristiques (et leurs harmoniques) qui sont directement liées à la vitesse de rotation et au nombre de pales de la machine. La propagation du bruit de ces sources peut se faire efficacement à l’aide d’une méthode fréquentielle, d’autant qu’elles sont généralement connues par leurs composantes fréquentielles. Les équations de propagation acoustique s’obtiennent en considérant une petite perturbation de l’écoulement dans les équations d’Euler. En l’absence d’écoulement porteur, les équations d’Euler linéarisées se réduisent à une équation d’Helmholtz, dont la résolution ne demande pas nécessairement une discrétisation du volume. Une équation de type Helmholtz peut être trouvée lorsque l’écoulement porteur est potentiel [1]. Des couches de cisaillement présentes dans l’écoulement porteur nécessitent d’utiliser les équations d’Euler linéarisées pour prendre correctement en compte les effets de réfraction associés. Dans cette thèse, on s’est intéressé à la propagation acoustique de bruit de soufflante de réacteur, dont la source peut être modélisée par une décomposition modale sur quelques fréquences. Une approche linéarisée fréquentielle est bien sûr très adaptée. Pour résoudre ces problèmes, certains codes utilisent cependant une approche temporelle, comme dans [106, 128] ou encore [117]. Une étude de propagation aéroacoustique pour un bruit de machine tournante part d’une description de la source, qui est connue fréquence par fréquence, et décomposée en mode sur chacune de celles-ci. Ensuite, chacune de ces composantes donne lieu à un calcul de propagation aéroacoustique depuis le réacteur jusqu’à l’endroit d’intérêt en utilisant les équations d’Euler linéarisées autour d’un écoulement porteur. Enfin, le bruit total est recomposé par une somme pondérée et décorrélée de toutes ces composantes. Selon son but, un calcul de propagation aéroacoustique peut chercher à déterminer le bruit en champ proche ou en champ lointain. Dans le premier cas, il s’agit d’évaluer le bruit sur une surface proche de la tuyère du réacteur afin de détecter d’éventuels problèmes de fatigue acoustique (des matériaux) causés par un niveau sonore trop élevé. Le bruit en champ lointain sert à calculer la signature sonore d’un avion au décollage ou à l’atterrissage, afin de quantifier la gêne acoustique des habitants riverains d’un aéroport. Dans ces calculs en champ lointain, la propagation acoustique utilisant les équations d’Euler linéarisées est réalisée jusqu’à une surface d’interpolation située une certaine distance (typiquement une dizaine de longueur d’onde) afin d’une part que les termes acoustiques évanescents de champ proche soient éliminés, et d’autre part d’être loin des gradients de vitesse de propagation induits par l’écoulement – en d’autres termes être dans une zone de champ porteur uniforme non perturbé par l’avion. La propagation depuis cette surface d’interpolation, dite de Kirchhoff, jusqu’aux micros virtuels à grande distance se fait par une méthode intégrale basée sur des fonctions de Green. Ces dernières sont faciles à exprimer puisque l’écoulement est uniforme. L’aéroacoustique possède une particularité qui la démarque des deux autres applications précédemment mentionnées. Les calculs de propagation demandent un maillage différent de celui utilisé pour calculer le champ porteur. Les maillages Navier-Stokes sont très structurés près de la surface de l’avion, afin de capturer correctement la couche limite. Une discrétisation adéquate de cette couche limite demande de nombreux points près de la surface. Cela conduit à des éléments très étirés dans cette zone, comme on présenté sur la figure 1.2 en haut. Un calcul de propagation acoustique demande un maillage isotrope, afin de respecter une discrétisation suffisante (qui dépend de la longueur d’onde calculée) dans toutes les directions possibles de propagation des ondes.