Obtention des produits virtuels et caractérisation des singularités
Virtualisation du processus de transformation (sciage)
Pour obtenir les Produits Virtuels, il est nécessaire de simuler, sur la représentation issue du tomographe à rayons X, les opérations qui sont réalisées sur ce même billon dans la suite du processus. Il est évident que cette application est généralisable à l’ensemble des processus de transformation divergents et présente alors le même intérêt d’anticipation, en améliorant la gestion. Obtention des produits virtuels et caractérisation des singularités
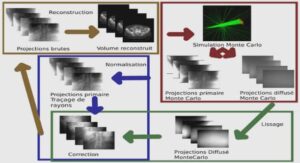
La virtualisation des opérations de débit consiste à simuler le résultat d’opérations de production réelles, sur l’image 3D du billon. Ces opérations peuvent être plus ou moins complexes suivant le domaine industriel étudié. Le principe de cette simulation est de « positionner », sur la représentation virtuelle de la matière première (et en particulier sur les sections obtenues précédemment qui permettent la reconstruction 3D),
les voxels (éléments de volume d’une image 3D) appartenant aux surfaces des produits finis usinés. Pour déterminer ces voxels, il faut trouver comment représenter le résultat de l’opération de débit afin de déterminer les coordonnées de l’ensemble des voxels correspondant à la surface du produit fini. Pour cela, plusieurs solutions peuvent être retenues comme l’utilisation d’un plan de débit ou d’une fonction spécifique décrivant la forme de la surface. Une fois les coordonnées déterminées, il suffit de les identifier sur l’ensemble des images que la surface coupe et de les assembler dans une matrice représentant l’image surfacique (2D) du produit. La figure 53 présente ce principe dans le cas du sciage virtuel.
Limites du sciage virtuel
Il existe plusieurs contraintes relatives au sciage virtuel qui devront être prises en compte dans la suite du processus et qui peuvent entraver la bonne réalisation de la prédiction et du suivi de la production. Les systèmes de vision ne permettent pas d’avoir l’ensemble des informations. Dans le cas du tomographe, les images obtenues donnent une information sur la densité du bois et renvoient donc des images en niveau de gris.
Dans [Bombardier & al, 2008], l’auteur donne les caractéristiques à étudier pour déterminer la nature des singularités. Une partie des singularités comme les nœuds noirs, les poches de résine, ou le bleuissement nécessitent l’information de couleur ou de texture pour assurer leur identification. Or ces informations, et en particulier la couleur, ne sont pas disponibles sur des images RX. Il faut donc trouver des moyen détournés pour les caractériser ce qui rend l’information imparfaite (incomplète voire incertaine).
Les temps de calcul informatique nécessaires à l’acquisition des images RX sont aussi un frein. Dans [Wei & al, 2010], les auteurs identifient plusieurs contraintes relatives à la mise en place de tels systèmes de vision dans l’industrie du bois. Tout d’abord, le temps de passage des grumes dans le scanner est important et ne correspond pas aux vitesses de travail habituelles. La résolution des images est liée à la rapidité de passage des grumes.
Ainsi pour obtenir des images correctes, il est nécessaire de ne pas avoir des vitesses de passage des grumes trop élevées. Récemment, l’entreprise Microtec a mis sur le marché un scanner RX ayant la capacité de fournir des images de bonne résolution (de l’ordre du millimètre) pour des cadences industrielles proches de celles rencontrées dans les scieries [Giudiceandrea & al, 2011]. Ce progrès nous laisse imaginer de futurs développements quant à cette technique.