Qu’est-ce qu’une onde ?
Une simple illustration, peut bien nous éclairer sur ce qu’est une onde. Ainsi, lorsque l’on jette une pierre dans l’eau, de petites vagues successives se forment à la surface de l’eau. Ces vaguelettes progressent dans toutes les directions (en cercles concentriques à partir de l’endroit où est tombée la pierre) et s’atténuent petit à petit : ce sont des ondes. Une onde est donc un phénomène physique qui résulte d’une perturbation (ici l’impact de la pierre dans l’eau), dont les effets se propagent dans un milieu (comme la surface de l’eau). Une onde se caractérise par sa direction, sa vitesse de propagation et son amplitude, qui dépend de l’intensité avec laquelle se produit la perturbation qui en est à l’origine : plus l’on tape fort sur une cloche, et plus le son émis est intense. Enfin, une onde se caractérise par sa longueur d’onde ou sa fréquence qui représente un cycle par seconde. Il existe plusieurs types d’ondes qui se différencient en fonction du milieu dans lequel elles se forment et du milieu dans lequel elles se propagent (eau, air, champ électromagnétique…ect), tel que la lumière, les vagues et le son. Mes recherches se sont limitées uniquement aux ondes sonores, car ils représentent la partie la plus importante de mon travail.
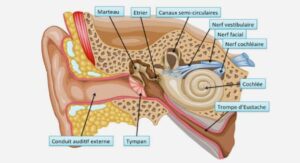
Onde sonore ou acoustique : De la même façon que précédemment, on peut illustrer que le fait de parler perturbe les molécules d’air (en parlant par exemple), on crée des ondes sonores (c’est-à-dire des sons). Si on pouvait voir ces molécules, on verrait une alternance de fines couches d’air comprimées et d’autres dilatées. On peut cependant remarquer que le terme de son est parfois restreint aux ondes acoustiques qui se propagent dans l’air, mais actuellement les physiciens en étendent la portée aux vibrations similaires qui se produisent dans les milieux liquides et solides. On perçoit plusieurs types d’ondes acoustiques comme le montre la figure suivante : Les sons de fréquence inférieure à 20 Hz sont appelées infra-sons, et ceux de fréquence supérieure à 20 KHz sont appelés ultra-sons ; entre ces deux fréquences se trouve les sons (fréquence audible par l’être humain). La sensibilité auditive chez l’homme, correspond aux vibrations qui atteignent l’oreille interne, correspondant aux fréquences audibles par l’être humain. Ces dernières sont comprises entre 20 Hz et 20 000 Hz. De nombreux animaux perçoivent et émettent les ultrasons comme les insectes, les chiens…. On sait tous que la chauve souris ne possède pas le sens de la vision, mais elle arrive à se déplacer sans heurter aucun obstacle et ceux par l’émission réception des ultrasons principe sur lequel est basé ce travail.
Définition des ultrasons:
Les ultrasons sont des ondes acoustiques, donc mécaniques, de fréquence supérieure à la fréquence de coupure de l’oreille humaine. La discipline des ultrasons est née véritablement au cours de la première guerre mondiale. En effet, dans le but de détecter les sous-marins, P. Langevin (physicien) eut l’idée d’utiliser la « piézoélectricité » pour produire et recevoir les ondes sonores ; il donna ainsi naissance à l’acoustique sous-marine, à ce titre il devint un ancêtre du Sonar (Sound Navigation Ranging). L’effet piézo-électrique est défini comme la propriété que possède certains corps de se polariser électriquement sous l’action d’une contrainte mécanique. Il fut découvert en 1880 sur le quartz et le sel de Rochelle, par Pierre Curie et son frère Jacques, qui lui donnèrent le nom de piézo-électricité (du grec piezein, « presser »). L’effet piézo-électrique peut être observé sur un grand nombre de substances cristallines, comme le titanate de baryum et la tourmaline. Il est dû au déplacement d’ions dans un cristal dont la cellule élémentaire. Sous l’effet de la compression du cristal, les ions de toutes les cellules élémentaires sont déplacés, ce qui engendre une polarisation de ces cellules. Comme la structure cristalline est régulière, cette polarisation se propage vers d’autres cellules, créant ainsi une différence de potentiel entre certaines faces du cristal. Lorsqu’un champ électrique externe est appliqué au cristal, les ions des cellules élémentaires sont déplacés par des forces électrostatiques, ce qui engendre la déformation mécanique du cristal. Pouvant convertir un effort mécanique en tension électrique, et réciproquement, les cristaux piézo-électriques sont utilisés dans la fabrication de dispositifs tels que le transducteur et le microphone. Ainsi, nous pouvons remarquer donc que la piézo-électricité a été la chance des ultrasons, permettant de les produire et de les observer à une échelle industrielle sur une vaste plage de puissances (émissions pouvant être inférieures au dixième du mWatt/ cm2 en diagnostic médical, souvent supérieures au KWatt/cm2 pour les applications énergétiques industrielles), et de fréquences (depuis le KHz en acoustique sous-marine, jusqu’au GHz en microscopie acoustique). Depuis, les ultrasons ont de nombreuses applications : Sonar, métallurgie, échographie médicale ainsi qu’on télémétrie.
Interprétation du programme : Une fois la réalisation pratique de la partie mesure de notre travail achevée, nous entamons la programmation du PIC16F876 (1); celle-ci consiste à créer un programme qui permet de répondre au cahier de charge du système réalisé : ce programme (représenté en ANNEXE 2) a été écrit langage pascal sous l’environnement MikroPascal 8.01 de la société MikroElectronika. Le système que nous avons réalisé, a comme principal but de permettre la mesure de la taille d’un enfant, d’afficher le résultat de la mesure sur des afficheurs 7 segments et d’envoyer la valeur de la mesure à la carte mère sur une requête de celle-ci. Pour cela, on appuie sur le bouton de démarrage RA1 qui actionne la mesure puis l’affiche. Ensuite, on envoie une requête de la carte mère afin de pouvoir récupérer et stocker la valeur mesurée. En première partie du programme, nous nous sommes intéressés uniquement à l’obtention de la mesure de la taille de l’enfant que nous notons l et ce en suivant le déroulement des différentes phases schématisées par l’organigramme de la figure 2. Il s’agit d’abord de l’envoi d’un train d’ondes ultrasonores de 40 KHz à l’aide de la fonction PWM et tout de suite après déclencher le TIMER qui commence à compter les impulsions avec un cycle de 0,5μs. Le transducteur ultrasonore émetteur émet les ondes qui vont être reçu par le capteur récepteur après un temps correspondant à un aller retour. Le signal sous forme d’écho va être reçu et détecté sur l’entrée RA2 du microcontrôleur.
Une fois le signal reçu, le TIMER est arrêté, sa valeur est proportionnelle à la distance parcourue par l’onde ultrasonore. Dans le cas où l’écho n’est pas reçu, il y aura un débordement du TIMER, le drapeau signalant l’interruption et remis à 0 pour que le TIMER recommence à compter pour la prochaine mesure. Puis à l’aide de la formule ⁄ , on déduit la distance d. Pour convertir cette distance obtenue en taille l, on soustrait la grandeur d de la distance L séparant la source émettrice-réceptrice du plan de référence d’où : l = L – d. (voir figure 3.2) En seconde partie du programme, nous nous sommes penchés sur l’affichage qui suit les étapes de l’organigramme n°3 : Quatre afficheurs 7 segments ont été choisi afin d’obtenir un nombre qui contient quatre chiffres décimaux dont un après la virgule, ainsi la valeur affichée va aller de 000,0cm jusqu’à 299,5cm par pas de 0.5cm. Dans l’organigramme, ces afficheurs sont indexés par i allant de 1 à 4. (1) (voir description du microcontrôleur dans la partie 1 chapitre 3) Les afficheurs utilisés sont multiplexés : dans un système d’affichage, le multiplexage est un procédé qui consiste à utiliser plusieurs voyants ou plusieurs afficheurs et à ne pas tous les allumer à la fois. Nous avons choisi un pas de T = 10ms Donc : le temps réservé pour chaque afficheur est de 2.5ms.
L’objectif même du génie biomédical est de concevoir et d’améliorer l’appareillage de diagnostic et de traitement médical. C’est dans ce contexte que nous avons réalisé ce modeste travail d’investigation et de recherche. Il consiste à réaliser un appareil de mesure de la taille en pédiatrie. Cette grandeur est choisie car elle indique le premier outil d’évaluation des troubles de croissance pouvant être due à des maladies parfois graves. La conception de notre instrument consiste en l’étude et la réalisation d’un télémètre ultrason piloté par un microcontrôleur de type PIC 16F876 ; l’étude m’a permis bien sûr de compléter et d’enrichir mes connaissances théoriques en électronique alors que la réalisation pratique qui parait simple à première vue ne peut se faire qu’en résolvant les problèmes et les difficultés qu’on peut rencontrer au fur et à mesure qu’on avance dans cette étape pratique. D’ailleurs, nous avons rencontrés beaucoup de difficultés pour obtenir les résultats souhaités, car les caractéristiques des capteurs ultrasonores existant dans le laboratoire ne convenaient pas à notre applications, ce qui a beaucoup ralentit l’avancement de notre travail pratique. La maquette du système a été réalisée grâce au logiciel PROTEUS (ISIS et ARES) de la société Labcenter et la partie logiciel grâce au logiciel MICROPASCAL de la société MICROELECTRONICA. Enfin, les perceptives pour ce projet sont d’arriver au concept final, à savoir la réalisation d’un système pour la mesure du poids, puis d’établir une connexion entre les deux systèmes de mesure (taille et de poids) et la carte mère pour permettre le stockage des informations pour être traitées et transformées en courbes de croissance pour chaque patient.
Introduction générale |