1. On considère que le programme principal est actif tout le temps. Le calcul de pi avec 3 décimales ne doit pas prendre beaucoup de temps. Le programme principal peut donc être bloqué par un appel synchrone de la méthode calculerPI le temps d’effectuer le calcul.
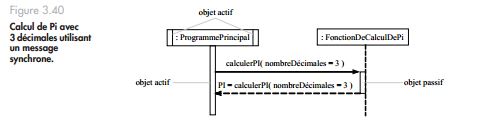
Remarque:
La tête de la ligne de vie Programme Principal contient deux traits verticaux qui indiquent que l’objet est actif. Le double trait qui court tout au long de la ligne de vie indique aussi un objet actif. Ces deux notations présentes simultanément sont redondantes. Dans un dia- gramme de séquence, les deux traits verticaux dans la tête de la ligne de vie sont superflus, tandis que dans un diagramme de communication, comme aucun pointillé n’indique la durée de vie d’un objet, ces deux traits sont indispensables.
Un objet actif possède son propre thread de contrôle, c’est-à-dire qu’on peut lui appliquer des méthodes dans un flot d’exécution indépendant des autres flots d’exécution existants. Un objet passif, au contraire, a besoin qu’on lui « donne » un flot de contrôle pour lui appliquer une méthode.
2. Calculer Pi avec 3 000 décimales peut prendre du temps. Dans ce cas, il vaut mieux utiliser un message asynchrone pour ne pas bloquer le programme principal le temps d’effectuer le calcul.

3. La réception d’un courrier électronique peut se faire n’importe quand après l’émission. Il ne faut donc pas bloquer l’émetteur et utiliser un message asynchrone.

4. L’émetteur et le destinataire sont des objets actifs qui sont bloqués le temps d’envoyer ou de récupérer un courrier.
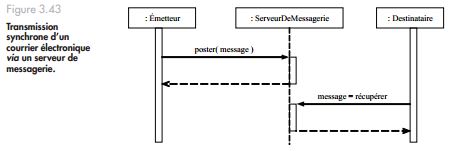
5. Les transmissions sont asynchrones et les messages peuvent être reçus dans un ordre différent de l’ordre d’envoi.

Remarque:
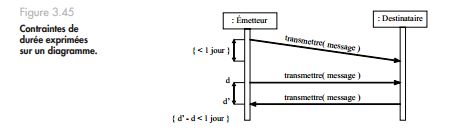
La durée de transmission d’un message peut être indiquée en ajoutant des contraintes sur un diagramme, comme le montre.