Eléments de correction : le codeur incrémental appliqué au transgerbeur
Eléments de correction
Acquisition de la vitesse
- L’angle géométrique s’exprime de la manière suivante
- on a d’où
Or on en déduit
- Il faut que la vitesse soit constante sur la durée de la mesure T0.
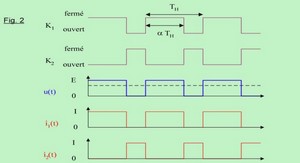
- Un chronogramme permet de mettre en évidence l’encadrement de T0:
D’où Ni.T£ T0 < Ni+1.T On peut conclure que l’approximation Ni.T = T0 est une mesure par valeur inférieure tenant compte que la valeur réelle Nr est supérieure de d.T avec
0 £ d < 1
Nr = (Ni +d). T
- Vitesse minimale mesurable : T= T0.
Soit alors
- On dispose d’un compteur n bits on peut donc compter de 0 à (2n-1).
La vitesse maximale Nmax correspond à la valeur maximale du compteur.
- Application numérique : dN = 12 tr.min-1. et Nmax = 180 tr.min-1. On pourra vérifier que compte tenu des caractéristiques de la chaîne cinématique le dispositif est apte à mesurer la vitesse maximale imposée.
- Acquisition de la position
Rappel de la table de vérité de la bascule D.
| D | Qn+1 | |
|
H |
0 | 0 |
| 1 | 1 | |
| H =0 | X | Qn |
Son fonctionnement peut être résumé par la phrase suivante :
Sur front actif de l’horloge (ici montant), la sortie prend la valeur de D. Si H=0 alors la sortie est figée c’est l’état mémoire.
Réponse 2.1.1 et 2.1.2 Voir chronogramme page suivante :
- Les signaux A et B sont déphasés d’1/4 de période soit d’un angle électrique de 90° ou encore p/2 radians.
L’équation d’origine angulaire est O = A.B.Z.
- Un tour du disque génère R impulsions il faut par conséquent déterminer combien de tour effectue le disque pour parcourir 1 mètre.
1 tour du disque c’est aussi un tour de la poulie et un déplacement linéaire correspondant de p.Dp où Dp est le diamètre de la poulie.
Il vient alors
N = 2273 impulsions
- et dz = 0.44 mm
- Si on accouple le codeur à l’arbre rapide il faut tenir compte de l’inverse du rapport de transformation c’est à dire 20.
Donc dz = 22.10-6 m et N = 45473 ce qui induit un nombre de bits pour le compteur beaucoup plus important soit 16 bits, inacceptable pour la mise en œuvre d’une solution technologique câblée, mais acceptable pour un API. En revanche la précision est bien meilleure. Il convient de vérifier la compatibilité de la fréquence des signaux délivrés par le codeur avec l’API. Ici la fréquence est de 1250 Hertz. Il faudra solliciter l’entrée de comptage rapide.
Une autre solution serait de garder la même précision que sur l’arbre lent dz =0.44 mm. Alors il nous faut un codeur de résolution de 25 pts.tr-1 au moins. On aurait alors N = 2273 impulsions.
- En cas de coupure d’énergie il y a perte de la grandeur position, il faut donc amener le système en position d’origine (ou connue). Le constructeur a en effet mis en place un grafcet de mise en position initiale.