- Tuesday
- April 8th, 2025
- Ajouter un cours
Cours physique chimie
Découvrir une liste des cours de physique, vous pouvez télécharger des cours physique pdf sur les techniques et astuces Physique-Chi vous allez aussi pouvoir améliorer vos connaissances en Physique-Chimie et créer des programmes spécifique sans difficultés. Aussi une sélection des meilleurs formations et cours avec exercices corrigés pour apprendre Physique-Chi.
Les cours de chimie-phys couvrent un large éventail de sujets dans les domaines de la physique et de la chimie. Voici une liste générale des cours typiques dans ce domaine :
- Physique générale
- Chimie générale
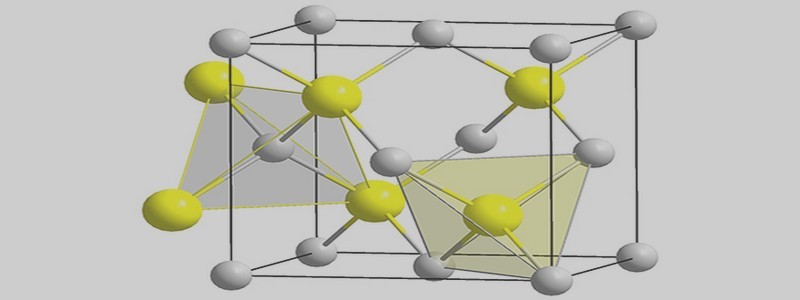
- Physique et chimie des matériaux
- Chimie organique
- Physique et chimie quantiques
- Chimie analytique
Voici une liste de certains des principaux sujets étudiés en physique, regroupés par grandes catégories :
Mécanique classique
- Lois du mouvement de Newton : fondamentaux de la dynamique des objets.
- Mécanique des fluides : étude des liquides et des gaz en mouvement.
- Théorie de la relativité restreinte : effets de la vitesse de la lumière sur le temps et l’espace.
Électromagnétisme
- Lois de Maxwell : comportement des champs électriques et magnétiques.
- Électrodynamique : interactions entre les particules chargées et les champs électromagnétiques.
- Optique : comportement et propriétés de la lumière.
Résolution du problème aux limites en position et orientation Formulation du problème Nous avons vu au chapitre 1 que la détermination de la conformation tridimensionnelle des acides nucléiques avec l’approche BCE (Biopolymer Chain Elasticity) requiert la résolution d’un problème aux...

REPRÉSENTATIONS EXTERNES EN SOUTIEN AUX ACTIONS INITIÉES EFFETS DES CAPACITÉS SPATIALES Capacités spatiales et représentations externes selon les actions : tests statistiques Ce chapitre adresse l’identification, selon les actions initiées, de liens hypothétiques entre la nature des représentations externes mobilisées...

Représentation des systèmes temps réel Nous distinguons entre le temps réel strict et le temps réel souple. Pour un système temps réel strict*, aucun dépassement d’échéance n’est toléré. Il s’agit là des systèmes critiques pour lesquels une défaillance peut avoir...

Relation entre l'abondance des petits poissons pélagiques et les facteurs environnementaux dans le système d'upwelling des Canaries Data sources Acoustic data The acoustic data were obtained as part of the EAF -Nansen project, a partnership between the Norwegian Agency for...

Réduction combinaison de formes de des pertes cuivre par spires Noyaux planar EE vs planar ER Comme nous l’avons vu dans le chapitre 1, les noyaux planar sont disponibles en matériaux ferrites dont les propriétés varient en fonction de leur...
Réduction de modèle pour les guides d’ondes Transformée de Fourier spatio-temporelle dans un guide d’ondes Un guide d’ondes est ici défini de manière assez générique comme une structure pour laquelle un motif géométrique de base est répété dans une ou...

Réduction d’expressions spécifiées par un système Système combinatoire d’arbres Dans cette partie, nous 8*/-éfinissonsproprementcequenousentendonsparsystèmes combinatoires d’expressions. des arbres d’expressions sous forme de classe combinatoire et de systèmes Dans toute cette partie, les arbres considérés sont des arbres planaires étiquetés enracinés,...
RECONSTRUCTION DE LA CINETIQUE D'HYDRATATION D'UN BETON A PARTIR DE CELLES DES REACTIONS D'HYDRATATION ET POUZZOLANIQUES Caractérisation de la cinétique des réactions d'hydratation des ciments c a et c b L'énergie d'activation apparente des réactions d'hydratation du ciment ca a...

Architecture simplifiée du Service d’Agilité et périmètre Suite au déclenchement de la détection et au calcul d’une divergence δ supérieure au seuil défini par les partenaires de la collaboration, le Service d’Agilité propose des recommandations d’adaptation (Figure V.1). Dans ce...
Réalité Virtuelle et Mouvements Pseudoscopiques Mouvements pseudoscopiques en réalité virtuelle Cette section propose une description des phénomènes observables face à une image stéréoscopique, notamment les mouvements pseudoscopiques ainsi qu'une de leurs conséquences, la position orthostéréoscopique. Mouvements pseudoscopiques Une image stéréoscopique...