- Thursday
- April 3rd, 2025
- Ajouter un cours
Cours automatisme
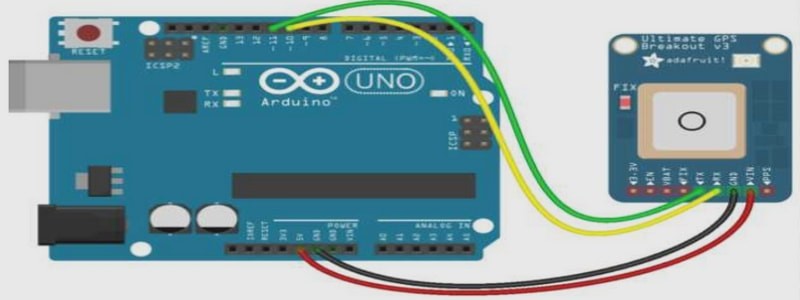
Cours automatisme : les machines-outils sont des systèmes mécaniques motorisés, servant typiquement à fabriquer des pièces métalliques ou plastiques par enlèvement sélectif de matière. Il s’agit par exemple de perceuses industrielles, de tailleuses d’engrenages, de tours, de fraiseuses, de meuleuses et autres usineuses. Si la plupart des machines-outils sont généralement limitées à deux degrés de liberté, certaines peuvent également opérer suivant trois axes.
L’étude commence par rappeler le rôle des automatismes dans l’économie mondiale avant de présenter les tendances technologiques récentes en matière de machines-outils et de robots. Les nouveaux défis et nouvelles opportunités sont exposés dans six domaines clés, dont chacun a des répercussions importantes sur les câbles et le câblage.
Les motivations et attentes des clients sont également abordées.
Un deuxième chapitre recense les solutions globales de Nexans dans les cinq principaux champs d’application pour les automatismes industriels, puis passe brièvement en revue les autres solutions et services pouvant s’appliquer aux nouveaux marchés des automates.
Cours automatisme pour des applications industrielle ? vous pouvez télécharger des modules électromécanique des systèmes automatisés en pdf sur les techniques électricité, électronique, BTS électrotechnique, automatismes, vous allez aussi pouvoir améliorer vos connaissances et être capable de réaliser des projets industriels sans difficultés. Aussi une sélection des meilleurs tutoriels et cours de formation gratuits pour prendre en main les automates programmables industriels.

La fatigue La définition du Larousse (10) de la fatigue dite « normale » est : « un état physiologique consécutif à un effort prolongé, à un travail physique ou intellectuel intense et se traduisant par une difficulté à continuer...

La Structure from motion (SfM) Le principe de Structure from motion (SfM, « Structure acquise à partir d'un mouvement ») est une technique d'imagerie par intervalle (en) photogrammétrique destinée à estimer la structure 3D d’un objet à partir d'images 2D....
CDA, ONG AU SERVICE DU DEVELOPPEMENT ECONOMIQUE Le CDA ou Conseil de Développement d’Andohatapenaka, est un des centres sociaux et de développement parmi ceux situés dans la ville d’Antananarivo. Le centre est un ONG qui œuvre dans le domaine social,...
L’évolution positive du droit des entreprises en difficulté à l’avantage du débiteur Le droit des procédures collectives a connu récemment une immense vague réformatrice qui n’a pas atteint uniquement la législation Française, mais un ensemble de pays européens, voire d’autres...

Apprendre la forme de l’objet : La voie What Extraction des caractéristiques visuelles La rétine est composée de trois couches : arrière, intermédiaire et avant. La première couche est constituée des cellules photoréceptrices : les cônes qui réagissent à l’ensemble...

Missions et objectifs de l’A.R.S Piloter la santé en région La première action de pilotage de la santé en région consiste à diriger les plans d’actions nationaux. A cet effet, les A.R.S. mettent en place une : Stratégie Nationale de...

Projet IniRobot Éducation à la robotique On peut se demander si l’on parle de robotique pour l’éducation ou d’éducation à la robotique. La question suscite en effet un débat dans le monde de l’éducation. Ci-après, nous prenons en compte les...

Preuve de correction de la traduction des automates en langage B Présentation de Coq Coqest un assistant de preuve basé sur le calcul des constructions, un λ-calcul typé d’ordre supérieur basé sur la correspondance de Curry-Howard. Les termes du langage...

Simulation La simulation est la méthode la plus utilisée pour l’évaluation des performances des réseaux et systèmes informatiques. Ceci est surtout lié à sa grande flexibilité. Cette partie présente les caractéristiques essentielles de cette méthode d’évaluation de performances, l’accent étant...
Théorie classique de la diffusion Nous avons dans cette partie étudiée la diffusion de Rutherford qui consiste à bombarder un noyau cible par des particules α et à étudier le comportement de ces dernières avant et après diffusion. Paramètre d’impact...