Les travaux de thèse trouvent leur origine dans une réflexion sur l’analyse approfondie d’une architecture de puissance dédiée aux fonctions traction et recharge d’un véhicule électrique (VE). Plus précisément, ces travaux ont pu être développés dans le cadre du projet FUI SOFRACI soutenu par le pôle de compétitivité MOV’EO et coordonné par la société Valeo. L’objectif de ce projet concerne une topologie innovante de convertisseur destinée à des applications VE offrant de multiples fonctionnalités telles que la traction, la recharge rapide ou lente sans utilisation d’un contacteur de reconfiguration matérielle, la marche dégradée, et le renvoi de l’énergie vers le réseau dans une démarche d’intégration à un réseau intelligent (« smart grid »). L’objectif des travaux de recherche est l’optimisation des lois de commande du convertisseur pour s’affranchir, en mode normal, des défauts intrinsèques de l’architecture et également assurer une continuité de service en définissant un fonctionnement en mode dégradé. L’effort porte principalement sur la fonction traction qui est la plus exigeante et la plus critique pour cette application.
Le marché du véhicule électrique (VE) est en pleine croissance au niveau Européen, et mondial. Ce développement croissant est essentiellement favorisé par les règles et les directives européennes, telles que les contraintes sur les émissions de CO2 visant à préserver la qualité de l’air dans les zones urbaines densément peuplées. A ce titre, quelques expériences sont déjà devenues réalité depuis plusieurs années : Praxitèle à La Rochelle et St-Quentin en Yvelines, beaucoup plus récemment le déploiement des solutions d’auto-partage ou location de VE : « Autolib » à Paris et sa proche banlieue, et aussi au niveau international zipcar® (USA), Communauto (Québec), Mobility® car sharing (Suisse)…etc.
Les diagrammes ci-dessous illustrent les perspectives de croissance exponentielle des des ventes et de circulation des véhicules électriques (VE) VE à l’horizon 2020 effectuées par l’Agence Internationale de l’Energie [IEA 2010] [IEA 2012]. La réalité, à la fin de l’année 2013, montre encore que ce marché en devenir a de la difficulté à prendre de l’ampleur.
L’environnement automobile est soumis à des contraintes spécifiques, ces dernières concernent principalement les questions liées aux coûts, masse/volume de la chaîne de traction embarquée et ont des effets directs sur la conception de l’électronique de puissance embarquée, mais les contraintes concernent aussi le développement de l’infrastructure de recharge associée au VE (domicile et bornes de recharge publiques). En effet, l’objectif aujourd’hui est de fournir aux utilisateurs des véhicules électriques une infrastructure de recharge disponible « presque » partout, en secteur privé ou en public. Actuellement les recharges standard lentes (4 à 8h) sont les plus répandues, mais il faut considérer les recharges dites rapides (30mn) sur le réseau triphasé, mais aussi les stations dites « Quick drop » permettant un complément de recharge (3mn) pour les nouvelles technologies de batteries au lithium [Albertus 2010].
Par ailleurs, dans un souci d’intégration système et de réduction des masses/volumes embarqués, les architectures électroniques récemment développées mutualisent les fonctions traction et recharge. Certaines d’entre-elles utilisent des convertisseurs en cascade qui conduisent à des solutions parfois complexes et coûteuses, d’autres innovantes utilisent la fonctionnalité réversible de l’onduleur de traction et utilisent la machine électrique comme nœud de puissance entre plusieurs sources (la batterie, « la mécanique », le réseau électrique) [De Sousa(a) 2010].
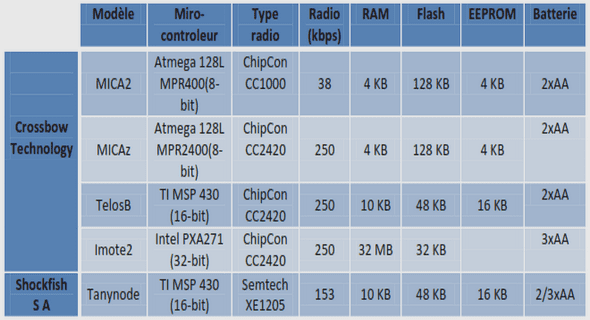
En outre, les solutions technologiques existantes utilisées dans le domaine du VE doivent autoriser un fonctionnement à marche dégradée, et être reconfigurables. Parmi les solutions technologiques existantes, deux architectures compétitives et attrayantes faisant l’objet d’un développement préindustriel ont été relevées. La première proposée par la société française Valeo [De Sousa(a) 2010] est constituée d’un onduleur en pont en H triphasé alimentant séparément les trois phases d’un moteur synchrone à aimants permanents (MSAP). La recharge s’effectuant sans contacteur additionnel à travers les enroulements de la machine. La seconde proposée par Renault [Loudot 2009] qui consiste en un onduleur I.G.B.T. / diode triphasé classique avec quatrième bras supplémentaire relié au point neutre pour les stratégies correctives alimentant une MSAP.
Les autres contraintes qui affectent spécifiquement l’EV concernent le point de vue technologique : cycles électrothermique, compatibilité électromagnétique (CEM), la fiabilité et la continuité du service. Ce chapitre introductif est structuré selon les parties suivantes. En premier lieu, nous exposons les contraintes électrothermiques et mécaniques, spécifiques à l’environnement du véhicule électrique, qui affectent la tenue et le comportement physique des modules semiconducteurs de puissance. Dans un deuxième temps, nous présentons successivement la problématique des défaillances des composants et de la commande dans une stratégie de modulation M.L.I., les architectures de convertisseurs tolérantes aux défauts pour les applications dédiées au VE, celles autorisant la mutualisation des fonctions traction et recharge. En dernieu lieu, nous rappelons le positionnement de nos travaux dans le cadre du projet SOFRACI ; il s’agit de l’optimisation de la commande de l’ensemble convertisseurmoteur associé, l’étude des défauts de la commande, et le fonctionnement à marche dégradée.
L’environnement de l’automobile est un domaine contraignant pour les composants semi-conducteurs en raison des cycles thermiques répétitifs (cycles marche/arrêt), du confinement thermique [Martineau 2010][Bouarroudj 2010] et de la variation périodique des pertes (échauffement) dans les composants. C’est donc un environnement sévère dans lequel les semi-conducteurs de puissance sont soumis à des contraintes thermiques, électriques et mécaniques accélérant leurs mécanismes de dégradation et de vieillissement [Bouarroudj 2007]. En effet, sous ces sollicitations fonctionnelles et environnementales hostiles, les efforts électro-thermo mécaniques endommagent, avec le temps, la structure interne du composant silicium finissant par un défaut en circuit ouvert ou court-circuit. Pour l’assemblage du module de puissance, la contrainte la plus défavorable est le cyclage thermique et de puissance.
Classiquement on distingue trois phases de fonctionnement dans les applications de traction électrique ;
• phase alternative (démarrage, arrêt, ou cas plus critiques : montée de trottoir, entrée d’autoroute)
• phase continue (propulsion du véhicule)
• phase d’immobilisation (recharge de la batterie)
Habituellement, la chaîne de traction automobile devrait être capable d’assurer une dizaine de milliers de cycles [Schwab 2006]. Autrement dit, cela représente deux démarrages et arrêts par jour. Les cycles de démarrage et de freinage du véhicule sont caractérisés par un fort appel de puissance ; un couple de démarrage ou de freinage important. Ce cyclage est bien connu dans les applications de traction électrique. Il représente la cause prédominante de défaillance des composants semi conducteurs de puissance. Le cyclage entraîne de forte variation de la température au sein du composant et induit des contraintes thermo-mécaniques à l’ensemble des constituants du module. En sus des cycles consécutifs dus aux démarrages/arrêts s’ajoutent les cycles thermiques provoqués par la variation périodique des pertes dans les semi-conducteurs (I.G.B.T. et diodes). Cette variation résulte de la forme d’onde quasi-sinusoïdale des courants. Un exemple évident parmi d’autres ; lorsqu’un véhicule électrique roule à très faible vitesse sur une pente de montée et/ou avec une forte charge embarquée, les courants absorbés par le moteur sont importants (forte demande de couple). Cependant la vitesse (fréquence) à laquelle ces courants évoluent est en regard nettement plus faible. Par analogie, il en est de même pour la vitesse à laquelle évolue l’échauffement du silicium. Toujours dans l’exemple du démarrage du VE, la forte densité de puissance injectée provoque une élévation locale de la température de la puce semi-conductrice . La constante de temps thermique des différentes couches de matériaux (cuivre, alumine, silicium, aluminium, céramique…etc.) à cette sollicitation n’est pas identique en raison de la forte disparité des coefficients de conductivités thermiques (λp, λb,λm,λDCB,λs) [Carubelli 2003]. Comme la capacité calorifique des puces en silicium est faible, les semi-conducteurs ne permettent pas d’intégrer thermiquement ces variations [Ciappa 2002]. Ce qui induit des contraintes thermiques affaiblissant (avec le temps) certaines couches du packaging du module. Les contraintes mécaniques appliquées sur les éléments de l’assemblage sont les conséquences du stress thermique du cyclage. En effet, même ici la dilatation des couches de matériaux (silicium, cuivre, céramique…etc.) n’est pas identique et harmonique en raison de leurs différents coefficients de dilatation thermique. Il en résulte donc des efforts mécaniques (flexion, compression) qui viennent endommager la structure interne du module. Citons l’exemple de la semelle qui sert à la fois pour la fixation du module de puissance et l’évacuation des charges thermiques vers le refroidisseur. Cette dernière est soumise elle aussi à de fortes contraintes thermiques et mécaniques. De ce fait, l’interface de contact semelle-refroidisseur doit posséder le moins de défauts afin d’avoir une surface d’échange identique, donc une meilleure évacuation de la charge thermique.
Introduction générale |