Contrôle non destructif du sol et imagerie d’objets enfouis par des systèmes bi- et multi-statiques
Problèmes direct et inverse
Dans la suite deux problèmes seront considérés, le problème direct dans lequel l’ensemble de la structure, des antennes et de ou des objets perturbateurs est connu et il s’agit alors de modéliser le signal reçu sur les antennes; le problème inverse dans lequel la structure, les antennes et le signal mesuré sont connus et l’on souhaite remonter à des informations sur le ou les objets perturbateurs.
Problème direct
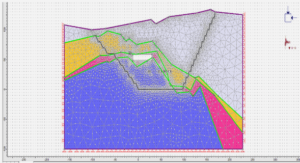
Le problème électromagnétique direct peut être schématisé par la figure (1.2). Dans ce problème, le système est comme une « boîte ouverte » : nous supposons que toutes les caractéristiques du système sont connues, par exemple : — Les caractéristiques géométriques du milieu et des objets : la taille, la forme, la position, etc. — Les caractéristiques électromagnétiques du milieu et des objets : la permittivité, la conductivité et la perméabilité. L’objectif est de déterminer la réponse électromagnétique (le champ réfléchi) du système quand le domaine est illuminé par une source d’excitation (le champ incident). Cela nécessite une formulation rigoureuse du problème à partir des équations de Maxwell. L’onde électromagnétique comporte un champ électrique et un champ magnétique qui se propagent dans le domaine étudié. Les équations de Maxwell décrivent mathématiquement les relations entre le champ électrique, le champ magnétique ainsi que la propagation des champs électromagnétiques [MAXWELL, 1865].L’équation de Maxwell-Ampère (1.1a) est héritée du théorème d’Ampère. Elle énonce que le champ magnétique est créé par des courants électriques ou par une variation temporelle d’un champ électrique. L’équation de Maxwell-Faraday (1.1b) décrit un champ électrique induit par une variation temporelle d’un champ magnétique. L’équation de Maxwell-Gauss (1.1c) démontre que le flux électrique est relié à la densité volumique des charges électriques. L’équation de Maxwell-Thomson (1.1d) traduit l’inexistence des charges magnétiques. Les tenseurs de permittivité et de perméabilité sont d’ordre 2 et de rang 3. Dans un milieu anisotrope, toutes les composantes des tenseurs ² et µ peuvent être non nulles. Si le milieu est isotrope, ils sont respectivement ² = ²I3 et µ = µI3 avec I3 la matrice identité. Le système formé par les équations de Maxwell contient deux inconnues vectorielles (E et H) et par conséquent 6 inconnues scalaires. L’étude du problème direct est basée sur la résolution sous certaines contraintes des équations de Maxwell. Nous pouvons les résoudre dans les domaines fréquentiel ou temporel.
Régime temporel
En régime temporel, nous cherchons à résoudre directement l’équation (1.1) afin de trouver une solution dynamique. La solution analytique des équations de Maxwell dans le régime temporel n’est que possible qu’en 1D. En conséquence, la mise en place d’une méthode numérique est indispensable pour déterminer une solution approchée en 2D et 3D. Nous introduisons d’abord la méthode des différences finies dans le domaine temporel, ou Finite Difference Time Domain (FDTD). Elle est la méthode la plus utilisée pour faire des si7 1 Introduction mulations en domaine temporel. Le formalisme de la méthode FDTD a été proposé par YEE [1966]. C’est la technique la plus exploitée dans les simulations GPR car elle est simple et très facile à implémenter [GHASEMI et ABRISHAMIAN, 2007; TEIXEIRA et collab., 1998; UDUWAWALA et collab., 2005]. Par contre la FDTD conventionnelle utilise un maillage rectangulaire (hexaèdre), ce qui rend difficile le traitement des géométries complexes. Des versions dérivées de FDTD sont proposées en utilisant des maillages non réguliers comme [HOLLAND, 1983]. La FDTD d’ordre élevé est aussi développée par ZINGG et collab. [1996]. Mais ces versions de FDTD sont difficiles à implémenter. Plus récemment et en parallèle à la FDTD, JOHNS [1972] a proposé la méthode TransmissionLine Matrix (TLM) pour la résolution de problèmes 2D de diffusion des ondes électromagnétiques dans des guides d’onde homogènes. Elle est un autre concept numérique basé sur le principe de Huygens et inspirée des techniques de simulation de réseau. La méthode TLM est ensuite développée pour l’application GPR par CHRISTOPOULOS [1997]; LIU et SHEN [1991]. La comparaison de la TLM et la FDTD pour la modélisation GPR peut être trouvé dans [GIANNOPOULOS, 1998]. Une autre approche utilisée pour la modélisation des antennes est la technique d’intégration finie, ou Finite Integration Technique (FIT) proposée par WEILAND [1977]. La méthode FIT est similaire à la méthode FDTD. Par contre la technique FIT exploite les équations de Maxwell sous leurs formes intégrales [WEILAND, 2001]. La FIT présente les mêmes avantages que la méthode FDTD, comme la simplicité de mise en œuvre et la haute efficacité. Elle compense également certains inconvénients de la FDTD, elle traite les interfaces entre différents matériaux de manière plus précise. Elle est aussi flexible dans la modélisation de géométries complexes avec plus de précision. Elle est particulièrement exploitée dans le logiciel commercial de simulation Computer Simulation Technology – MICROWAVE STUDIO (CST-MWS) pour les simulations temporelles. Les techniques FEM, MoM et FVM que nous avons mentionnées dans la partie précédente peuvent être utilisées dans le domaine temporel. Pour cela, on leur associe un schéma numérique afin d’obtenir l’évolution de la solution dans le temps. Pour les applications GPR en régime temporel, la FEM est présenté par LEE et collab. [1997]. La FVM temporelle est développée par JAMESON et collab. [1981]. Plus récemment la méthode de type Galerkin-Discontinu a été introduite pour la modélisation en électromagnétisme. C’est une méthode qui est classiquement utilisée pour résoudre les PDEs sous la lois de conservation [ARNOLD et collab., 2002]. Elle a été proposée initialement pour résoudre l’équation scalaire du transport des neutrons par REED et HILL [1973]. Ce type de méthode combine les avantages de FEM et de FVM. Elle évalue le champ sur chaque élément par une base de fonctions comme la FEM et utilise le terme de flux pour relier des éléments comme la FVM. FEZOUI et collab. [2005] ont proposé le formalisme conservatif et dispersif en utilisant des termes de flux numériques centrés. Une autre formulation 8 1.3 Problèmes direct et inverse non-conservative et dissipative en utilisant des termes de flux numériques décentrés a été introduite par HESTHAVEN et WARBURTON [2002]. L’utilisation des outils de simulation numérique pour l’analyse des problèmes électromagnétiques s’est démocratisée, néanmoins, il n’existe pas une méthode « universelle » qui proposerait la meilleure approche numérique pour une précision absolue. En effet, Il y a toujours un compromis entre la précision, la complexité de la mise en œuvre, l’efficacité, le temps de calcul, etc. Par ailleurs, certaines techniques sont bien adaptées pour des applications spécifiques mais leurs performances se dégradent pour d’autres. Dans le cas GPR, nous préférons travailler en régime temporel, où nous pouvons avoir une réponse qui couvre une large gamme de fréquences avec une seule simulation. Dans le cadre d’action COST TU1208, différentes approches sont développées et étudiées pour résoudre le problème direct dans l’application GPR. Par exemple, la méthode analytique est utilisée par FREZZA et collab. [2013] et MANGINI et TEDESCHI [2017] entre autre. Les performances des méthodes FDTD et FIT sont comparées pour la simulation GPR dans [WARREN et collab., 2017]. Par ailleurs, un logiciel de modélisation GPR basé sur la FDTD nommé « gprMAX » est développé par GIANNOPOULOS [2005]. Il est en open source et disponible sur http://www.gprmax.com/. Dans le cadre de cette thèse, nous nous sommes intéressés à la méthode de Galerkin discontinue dans le domaine temporel ou Discontinuous Galerkin Time-Domain (DGTD). Cette dernière est très peu utilisée dans la modélisation de scénario GPR et nous désirons tester ses avantages et son potentiel. La méthode DGTD a été utilisée pour étudier des guides d’ondes [HU et WANG, 2012]. L’efficacité et la précision de cette méthode sont mises en avant. ALVAREZ et collab. [2015] ont réussi à modéliser efficacement les antennes avec la méthode DGTD. Cette dernière peut aussi être appliquée dans l’étude GPR en utilisant des points sources dans un demi-espace dispersif [LU et collab., 2005]. La plupart des travaux sur la modélisation DGTD dans le cadre GPR sont faits en considérant des sources idéales (ponctuelles) afin de simplifier le calcul.
Liste des acronymes |